Alex constrói um motor Quattrini 252ccm Vespa 4 - estágio 2 com teste de exaustão
Na quarta parte de nossa pequena série de blog vamos fazer as seguintes alterações em nosso mecanismo de teste:
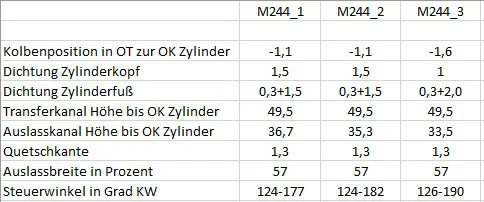
O cilindro está no pé com dois 1mm Espaçadores Elevado em mais 2 mm em comparação com o estágio de construção 0.5. Isso muda o ângulo de controle dos canais de transferência de 124 ° a 126 °. A fresagem é usada para ajustar a saída a um ângulo de controle de 190 °. Para isso, a saída do cilindro foi elevada em 1.8 mm. A largura de saída permanece inalterada em 57%.
![]()
As primeiras tentativas são feitas com o Elron
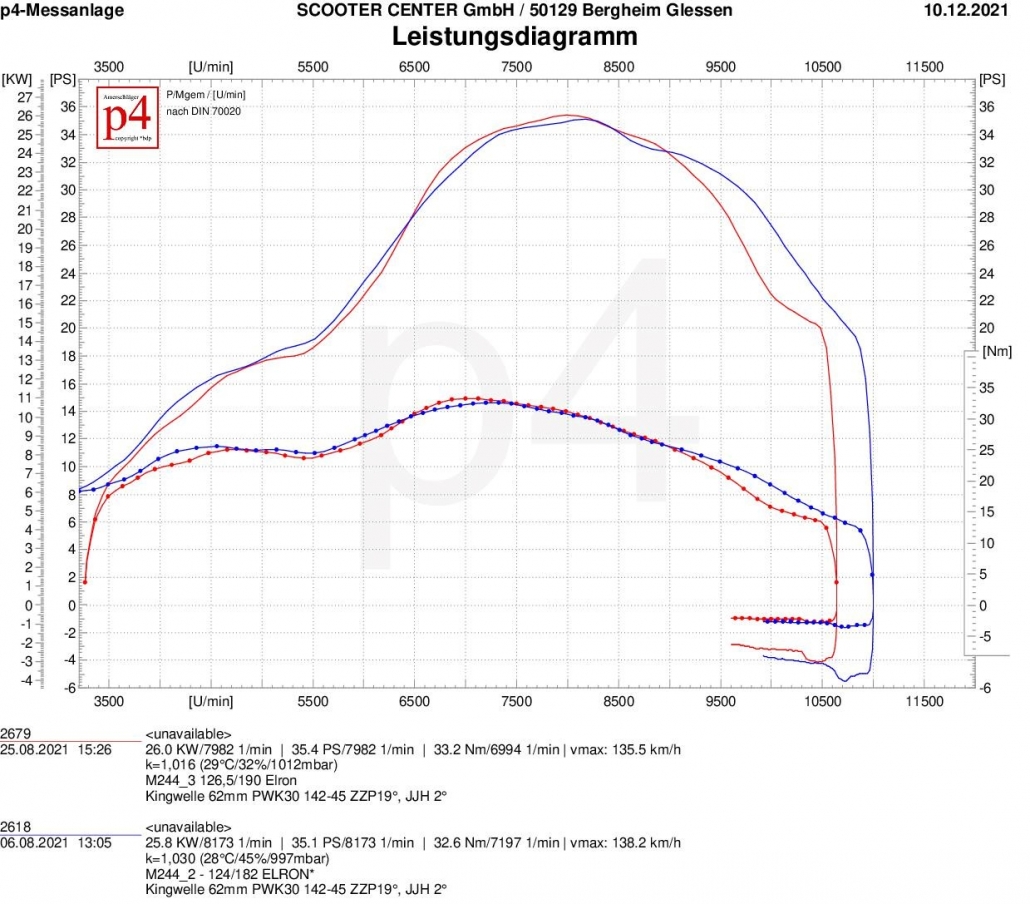
Um pouco mais de sistema de escapamento nervoso mostraria uma clara mudança na direção do desempenho com as mudanças feitas, mas o Elron quase não se impressiona com as especificações do cilindro e mantém o controle sobre as características do motor. Um ligeiro aumento nos valores máximos após o ponto decimal indica apenas que o Elron percebeu que o cilindro está enviando um sinal mais claro pelo escapamento. No entanto, o torque máximo permanece no mesmo nível que na primeira fase de construção.
A faixa de velocidade disponível é reduzida em 500 rpm a 3540 rpm.
Caixa Polini
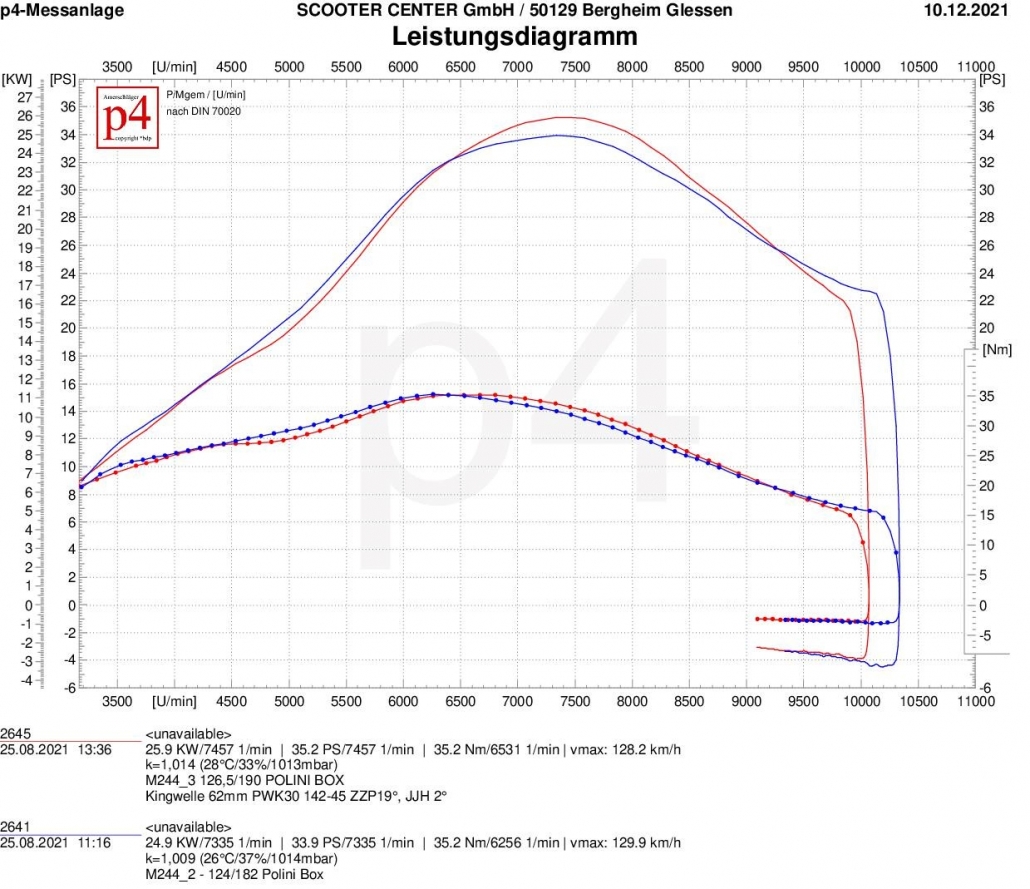
Como um escapamento de caixa, o sistema de escapamento Polini reage conforme o esperado. Semelhante ao Elron, a lata da Itália mostra apenas pequenas reações. A menor compressão efetiva faz a curva cair um pouco no aumento entre 4000 rpm e 6200 rpm. O sistema implementa a seção transversal de tempo ligeiramente aumentada na janela de saída com um ganho de pouco mais de um cavalo-vapor em seu pico.
O torque máximo permanece o mesmo em 35.2 Nm e muda apenas algumas centenas de revoluções na direção de velocidades mais altas.
Com uma largura de banda de 3800 revoluções, o sistema Polini está um pouco atrás da posição 2, mas este experimento mostra que a caixa não necessariamente prefere os ângulos de controle muito pequenos. Em comparação direta com o estágio de construção 1, a largura de banda e os valores máximos aumentaram significativamente.
JL mão esquerda / desempenho JL
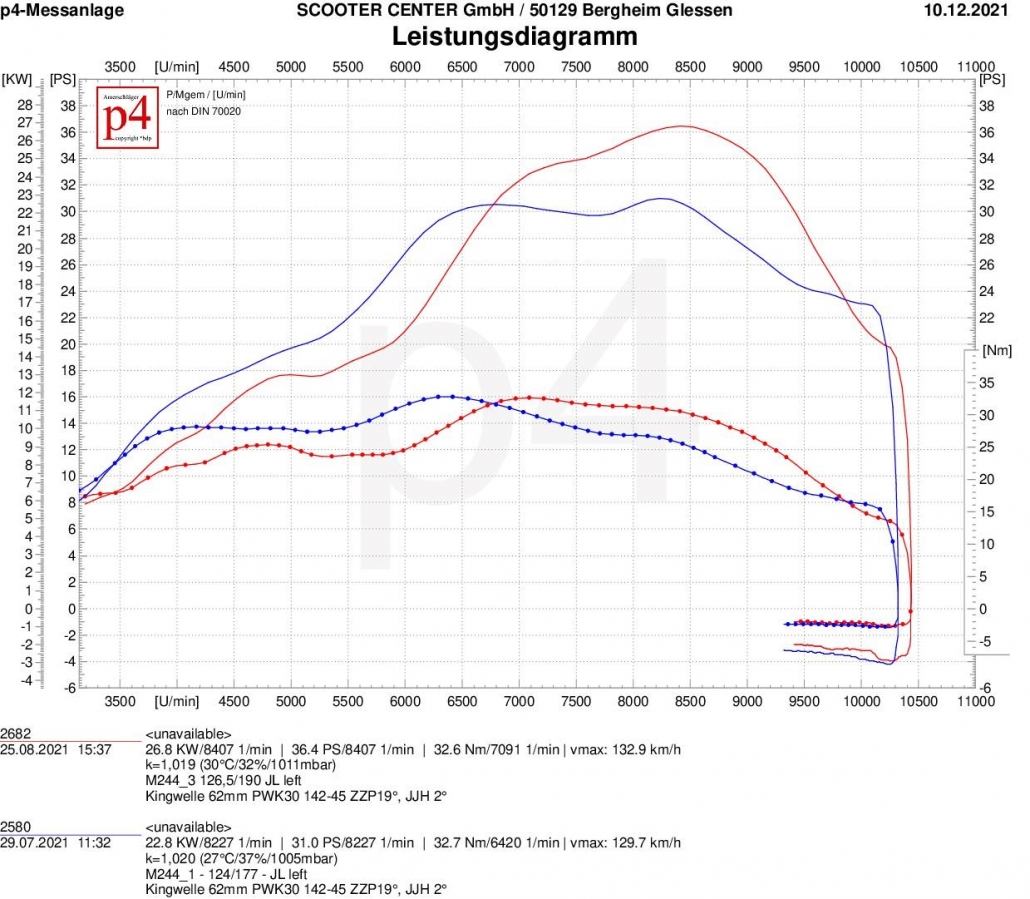
Nossa cobaia teve uma pequena pausa na fase anterior de construção, devido a compromissos fora de casa; mas agora joga novamente na terceira fase de construção. Portanto, aqui está a comparação entre os níveis 1 e 2.
De modo que também fica muito claro quão claramente um escapamento pode se comportar quando operado de outros ângulos de controle. JL, que é considerado afável, acaba se revelando um parceiro muito acessível em busca de performance.
No topo, o JL fornece quase cinco cavalos e meio a mais e sobe além da linha de 36 CV no gráfico. O torque permanece em 32.6 Nm no mesmo nível da primeira tentativa. No entanto, o torque se estende por uma faixa muito mais ampla - além de 7000 rpm. O pico de desempenho é alcançado com 36.4 PS a 8400 rpm. O JL apenas cai abaixo da linha de 25PS considerada na largura de banda além de 9600 rpm e, portanto, não pode ser descrito como uma velocidade lenta. Em geral, o gráfico muda significativamente na direção de velocidades mais altas. Com uma largura de banda de apenas 3400 revoluções, o JL ainda fica atrás do Elron e fica na retaguarda em termos de largura de banda nesta fase de construção.
Scooter e Newline de serviço
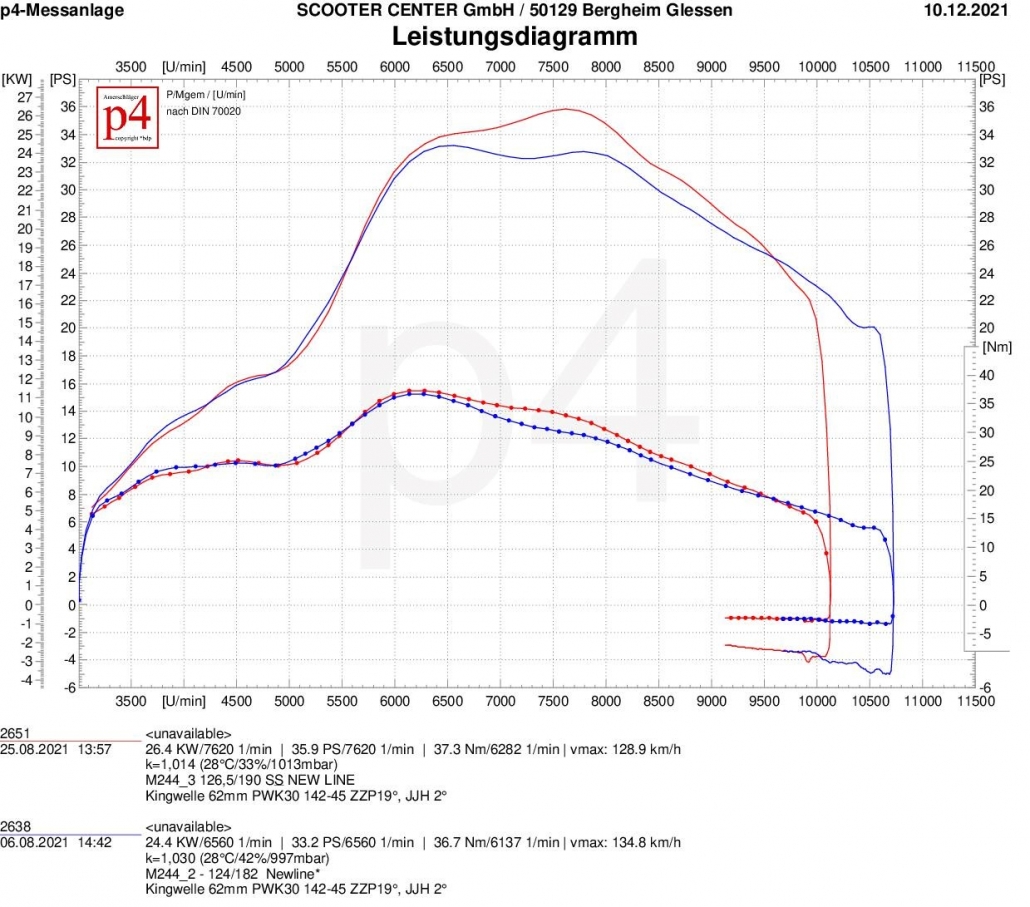
O homem de força angular do norte se sente em casa neste estágio de expansão e leva duas marcas de topo com ele.
Não há mudanças notáveis no aumento da nova linha, mas muda bastante devido ao maior ângulo de avanço na faixa de rotação do motor. Com 37.3 Nm, assume a primeira posição em termos de torque na terceira fase de construção. A faixa de velocidade disponível é mais estreita em comparação com os testes anteriores, mas também aqui o Newline atinge uma faixa de 4000 rotações. Com esses valores, as considerações germinam após um primário mais longo com 24-60 ...
Nessie
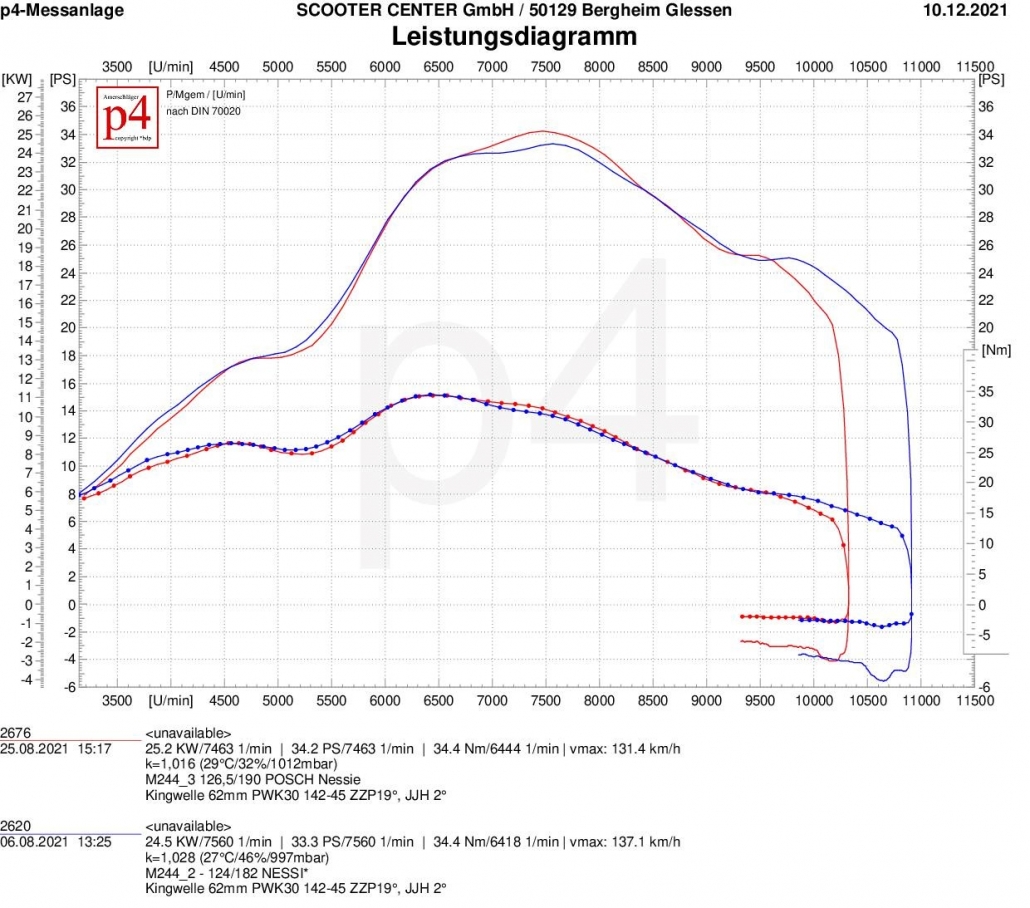
Semelhante ao Elron, o Seemonster da Posch Performance não tem certeza do que fazer com o ângulo de direção alterado. O torque máximo permanece o mesmo e a potência de pico aumenta em um cavalo-vapor. Enquanto o Nessie estava bem à frente no nível 1 com 4300 rotações na faixa, a faixa de rotações disponível no nível três vai um pouco para a estação de mergulho e está no meio-campo superior com 3700 rotações.
Corrida de Resi
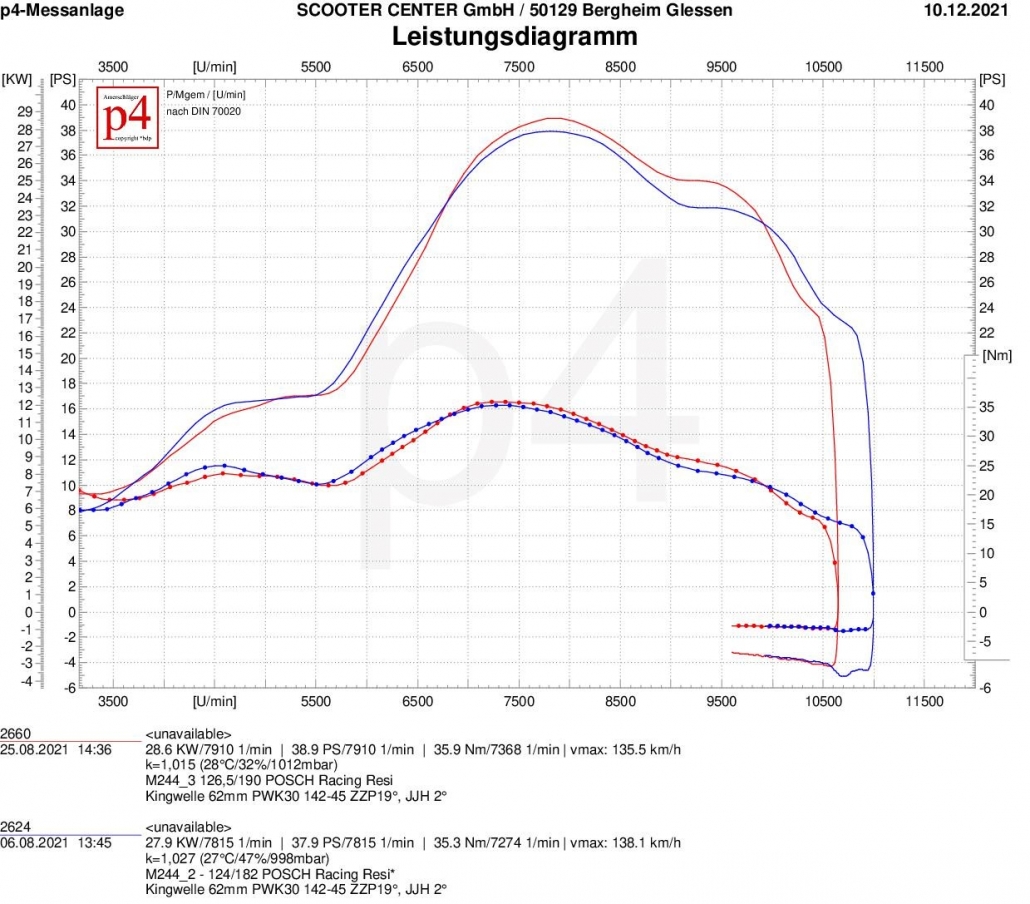
Racing Resi experimenta melhor as mudanças. Em vez ligado aos ângulos de controle mais altos, o Resi desenvolve mais uma potência no topo e adiciona torque, o que dificilmente afeta a largura de banda na linha de 25 CV. Em termos absolutos, o Resi detém a posição de desempenho de pico mais alto neste nível com 38.9 CV. Estamos nos aproximando lentamente da marca de 40 HP com os estágios de expansão.
Lakers
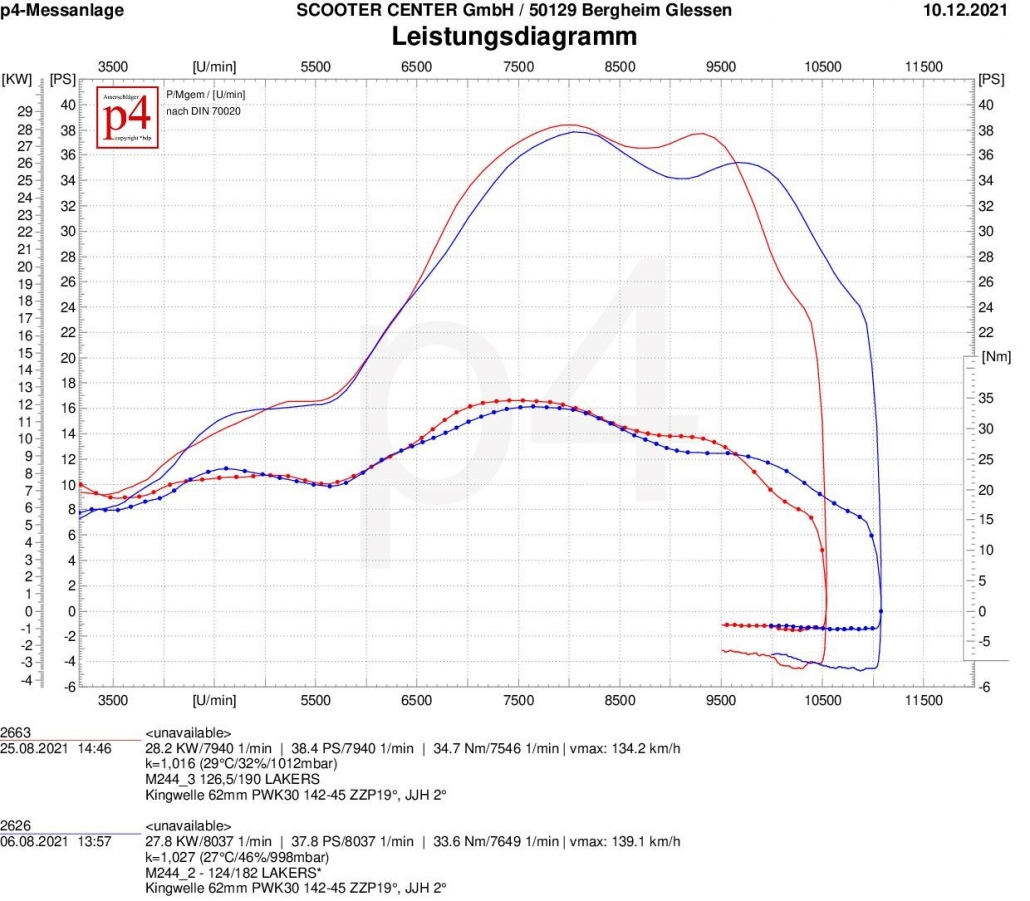
Com 126 ° a 190 °, os Lakers ainda não estão em sua zona de conforto. Embora também converta claramente o ângulo de controle alterado em desempenho. Com 38.4 CV no topo, está apenas atrás do Resi. Com uma faixa de velocidade de 3700 rotações, que agora se estende até 10.100 rpm, o Lakers mostra onde a jornada pode ir com periféricos adequados.
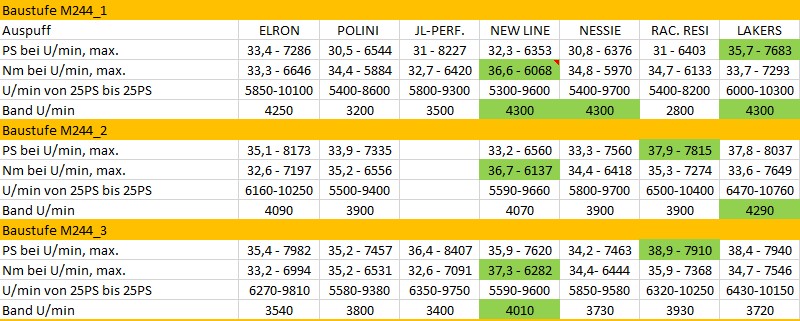
Aqui na visão geral os resultados. Os melhores valores são destacados em verde.


 -vespa-cilindro-pinasco-225-super-esporte")
 Membrana de evolução (curso de 54mm) - Vespa PV125, ET3 125, PK125 - virabrequim P2100070 necessário")






